|
Technik
 iSiOS
nutzt die naturgegebene Präzision des Lasers. iSiOS
nutzt die naturgegebene Präzision des Lasers.
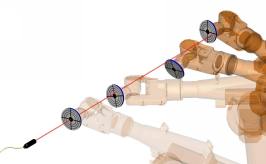
Das patentierte iSiOS-Funktionsprinzip
basiert auf der Abtastung eines exakt geraden Laserstrahls durch den
Roboter. Bei
Bewegung der Roboterhand entlang des Strahls werden kleinste
Abweichungen von der Geradlinigkeit erfaßt. Hieraus werden alle
Größen exakt bestimmt, welche die Stellungsgenauigkeit des
Roboters beeinflussen. Als Ergebnis erhält man ein präzises
Robotermodell, mit dem sich z.B. Deformationen, Nulllagenfehler der
Gelenke oder Lasteinflüsse vollständig und dauerhaft
kompensieren lassen.
iSiOS nutzt dieses Prinzip
üblicherweise in umgekehrter Anordnung: der kompakte, leichte
Laser wird vom Roboter
mitgeführt und bestrahlt einen feststehenden Sensor.
Genauigkeit
Kleine Roboterfehler werden über den Laserstrahl in voller
Größe am Sensor abgebildet. Dies ist die Basis der
prinzipbedingt hohen Empfindlichkeit des Systems, welche problemlos
weiter gesteigert werden kann - z.B. für die Kalibrierung von
Micromechanismen. Bei Messung an drei im Arbeitsraum verteilten
Sensoren bzw. Sensorstellungen liefert iSiOS
maximale Roboter-Absolutgenauigkeit im gesamten Arbeitsraum.
Die neue Kalibriertechnologie liefert entscheidende technische
Vorteile:
- Die i. a. grossen
Fehler, die durch Gelenk- und Balkenselastizitäten des Roboters
verursacht werden, können präzise identifiziert und
kompensiert werden. Diese Fähgkeit ist eine der Grundlagen
für die überlegene Roboter-Absolutgenauigkeit, welche
mit Hilfe des Isios Systems erzielt werden kann.
- Das geeignet groß dimensionierte,
temperaturinvariante
Carbon-Längennormal
des Isios-Systems mit zwei kostengünstigen Sensoren
gewährleistet eine hinreichende Fehlerdämpfung, um absolute
Längen des Roboters exakt zu vermessen, was mit Messungen in einem
eng begrenzten Bereich oder an einem einzigen Punkt
bzw. an einem einzigen Kalibrations- bzw.
"Referenz"-Objekt bei alternativen Ansätzen nicht
möglich
ist.
- iSiOS kommt ohne
Einsatz eines zusätzlichen Laser-Trackers aus, der bei hohen
Genauigkeitsanforderungen bislang stets zur
präzisen Vermessung der Stellungen der zwingend benötigten
Kalibrations- bzw. "Referenz"-Objekte relativ zum Roboter erforderlich
war.
- Das System
identifiziert und kompensiert nicht nur Positionsfehler bis zum
Handgelenk sondern auch Orientierungsfehler der Handachsen und des
Werkzeugs. Der von der Roboterhand ausgehende Laserstrahl wirkt bei den
Kalibriermessungen als fehlerverstärkender, langer Hebel und
führt im
Ergebnis
zu höchster Orientierungsgenauigkeit des Roboters.
Bei
Genauigkeitsangaben bezieht Isios stets die Absolutgenauigkeit an
der
benutzerdefinierten Werkzeugspitze (TCP) ein. Bei bestimmten Typen
6-gelenkiger Industrieroboter können z.B. am TCP eines
200 mm
langen Werkzeugs Absolutgenauigkeitsfehler von höchstens 0,25 mm
im gesamten Arbeitsraum inklusive beliebiger
Konfigurationswechsel (Schulter links / rechts, Ellbogen oben / unten,
Handflip) erzielt werden.
Am TCP einer 700 mm langen Schweißzange an typischen Robotern,
die im Automobilbau Verwendung finden mit bis zu 3 m Reichweite und 500
kg Tragkraft erzielt iSiOS
außergewöhnlich hohe Über-Alles-Genauigkeiten
von ca. 0,3 mm und besser. Die Über-Alles-Genauigkeit
ist die effektive Genauigkeit am
Werkstück, wenn die Zielposition nur relativ zur
Werkstückaufnahme bzw. zum Werkstück
vorgegeben ist. In diesem Fall ist die Werkstückstellung relativ
zum Roboter also vorab nicht genau bekannt sondern wird nach
Kalibrierung des Roboters automatisch mit iSiOS
vermessen.
Kosteneffizienz
Die skalierbare, ausgezeichnete Empfindlichkeit und hohe Auflösung
ist schon im technischen Funktionsprinzip des Systems angelegt.
Steuerung des kalibrierten Roboters
Die exakte Kenntnis der Werte des Robotermodells ermöglicht es,
den Roboter
absolutgenau zu steuern. Dafür sind vor jeder Arbeitsbewegung nur
Berechnungen – die sogenannte Inverse oder Rücktransformation -
aber keinerlei aufwendige Messungen erforderlich.
Die Berechnung kann durch die Robotersteuerung erfolgen.
Werden überlegene Höchstgenauigkeiten der Roboter gefordert
so kommt das sehr
schnelle iSiOS Echtzeit-Präzisionssteuerungs-Modul
zum Einsatz,
welches auf der Robotersteuerung oder auf einem externen Rechner
ausgeführt wird.
Vergleichen Sie iSiOS
- der Laserstrahl bringt die Präzision zum Sensor
- iSiOS benötigt keine aufwendigen,
empfindlichen Optiken oder Präzisionsmeßinstrumente. Die
skalierbare Sensitivität des Systems garantiert höchste
Absolutgenauigkeit im gesamten Arbeitsraum – übrigens auch
für kartesische Roboter, SCARA-Roboter und Kombinationen aus
Portalen und Gelenkrobotern.
- Beim iSiOS Inline
Kalibrationssystem bleiben alle Komponenten fest in der Zelle
installiert und sind
permanent
verfügbar. Nur die feste Installation und kontinuierliche
Verfügbarkeit ermöglichen Leistungen wie
- die minutenschnelle, synchrone Fehlerdiagnose aller
Roboter einer Fertigungslinie,
- permanente Fertigungsüberwachung u. a. auch
von Fertigungseinrichtungen wie Drehtischen,
- automatische Wiederherstellung der Genauigkeit nach
Kollisionen oder nach Roboterwechsel innerhalb von ca. 5 Minuten oder
- die produktionsbegleitende Temperatur- und
Verschleißkompensation.
- Berührungslose Funktion in rauhen, engen
Umgebungen, geringe Sichtbarkeitsanforderungen sowie hohe Robustheit
und Kompaktheit der Komponenten sind entscheidende Vorteile im
Praxiseinsatz.
- Das System erwirtschaftet einen Großteil seiner
Kosten schon während des Aufbaus von Fertigungseinrichtungen bzw.
Produktionsinien beim initialen Einmessen der Roboter und
Vorrichtungen. iSiOS ist für die
schnelle
Amortisation bei fester Installation in
allen genauigkeitskritischen Fertigungszellen von Produktionslinien
konzipiert und kalkuliert.
Vergleichen Sie Genauigkeit, Vorteile und Aufwand!
Planen Sie Vergleichstests? Isios unterstützt gern die kritische
Überprüfung der Präzision und Leistungsmerkmale von iSiOS
sowie den Vergleich mit anderen Messprinzipien.
|
 |